Projects
Autonomous Driving & Vehicle Control
Research conducted at the Vehicle Intelligence and Autonomy Lab (ViaLab), Pusan National University, under the guidance of Prof. Han-You Jeong. Special thanks to my lab colleagues for their invaluable collaboration and support throughout these projects.
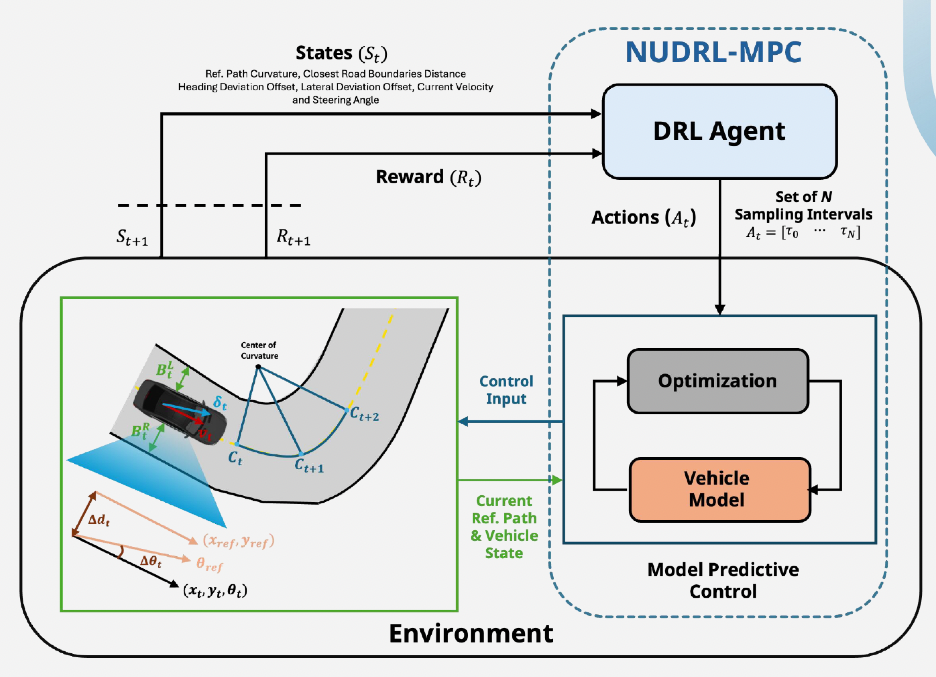
NUDRL-MPC
Mar 2024 - Dec 2024
Deep RL-guided non-uniform MPC for low-speed path tracking. Custom Hybrid A* datasets. 90% success rate.
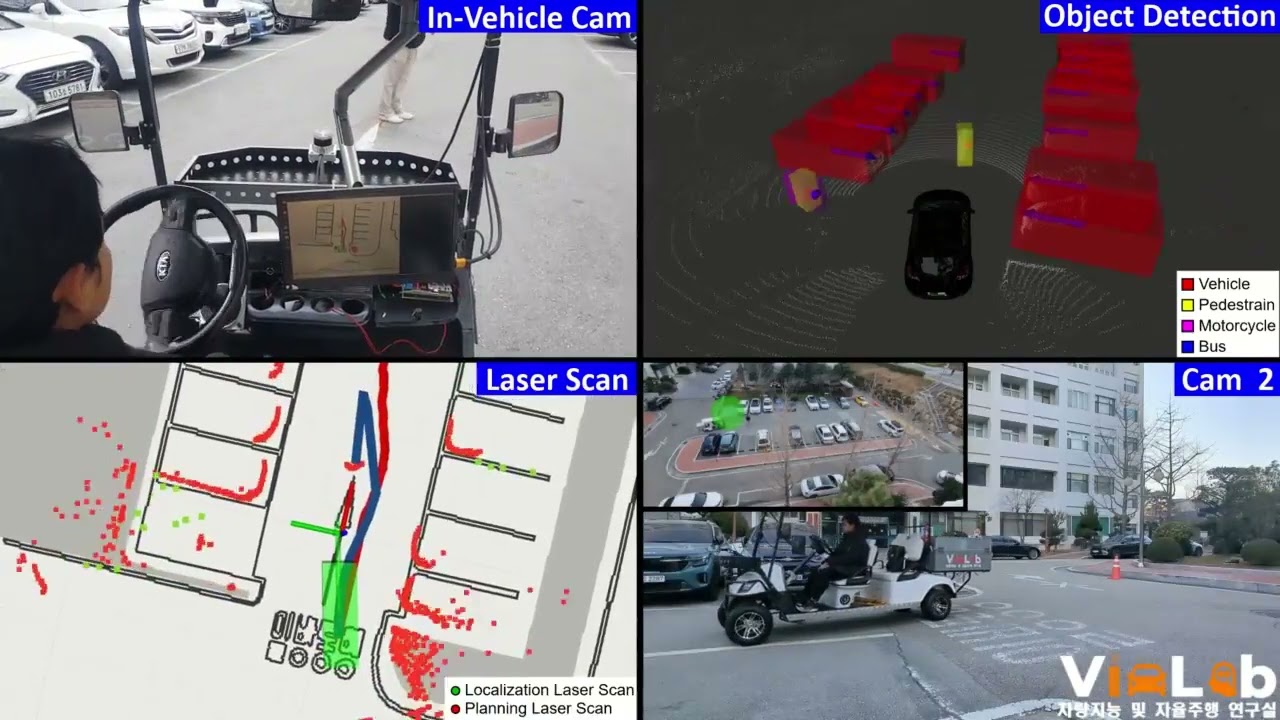
Mixed Traffic AVP
Aug 2023 - Feb 2024
Autonomous valet parking with improved AMCL (Ackermann model for 4-wheel vehicles), dual LiDAR, CenterPoint 3D detection.

Exclusive Traffic AVP
Sep 2022 - Jul 2023
Autonomous parking with linear MPC and structured parking management. Tested on real vehicle.