NUDRL-MPC
Deep Reinforcement Learning-Guided Non-Uniform Model Predictive Control
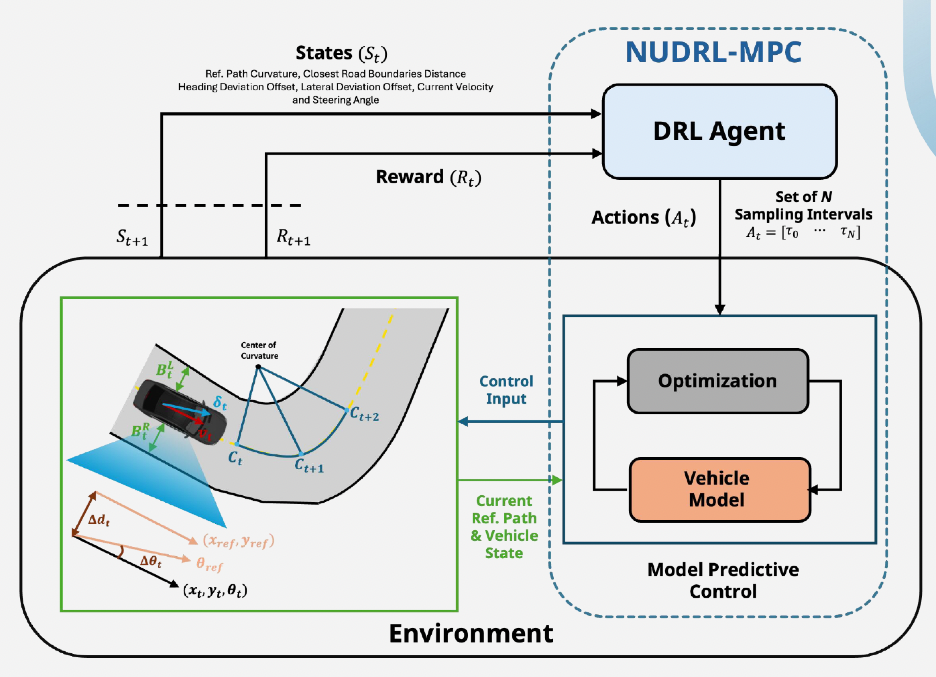
Master’s Thesis - Developed a novel control technique that dynamically optimizes sampling intervals for non-uniform model predictive control (MPC) using deep reinforcement learning, specifically designed for low-speed autonomous driving in unstructured environments like parking lots.
Problem Addressed
The approach addresses prediction horizon problems while considering the vehicle’s computational constraints - a key challenge in real-world autonomous driving applications where processing power is limited. In unstructured environments like parking lots, traditional uniform MPC struggles with balancing prediction accuracy and computational efficiency.
Technical Approach
- Deep RL Agent: Learns to select optimal non-uniform sampling intervals based on current state and environment conditions
- Non-uniform MPC: Adapts prediction horizon dynamically, using finer sampling near the vehicle and coarser sampling further ahead
- Low-speed Optimization: Specifically designed for low-speed scenarios (parking, maneuvering) where precision matters more than speed
- Unstructured Environments: Robust performance in parking lots and other irregular environments without predefined paths
- Benchmark Validation: Tested on custom path-following datasets in simulation
Implementation
Built using Python and PyTorch for the reinforcement learning component, integrated with MPC solver for real-time control. Custom datasets were developed using Hybrid A* path planning algorithm to generate realistic reference trajectories for training and evaluation in unstructured parking environments. The dataset is publicly accessible via the GitHub repository below.
Contributions: Path-Following Dataset with Multi-Level Difficulty for Autonomous Driving in Unstructured Roads - developed comprehensive benchmark datasets featuring varying complexity levels for robust controller validation. Also contributed to the NUDRL-MPC algorithm design and implementation.
Key Results
Achieved 90% path tracking success rate in unstructured environments, demonstrating clear superiority over conventional uniform MPC methods.
Publications
- “Optimal Path Tracking Control for Autonomous Vehicles using Deep Reinforcement Learning-based Non-Uniform Model Predictive Control” - KSAE Fall Conference 2024